厂家地址深圳市
速度1000mm/s
电压220V
机械精度正负0.02mm
重复精度正负0.02mm
1.3 软件
1、具有画点、直线、自由曲线、椭圆、多段线、三维圆弧(空间圆弧)、圆、跑道、矩形、涂布、自动圆角
等图形元素; 丰富的手工教导功能及图形预览功能。
2、具有条件跳转功能,和双 MARK 点旋转对针功能。
3、具有跳选功能, 能同时选中不连续的多条指令。
4、具有指令移动功能, 能将已编辑的指令移到目标位置。
5、具有区域阵列复制,偏移操作,批量编辑,单步运行,I/O 输入输出等功能。
6、具有自动执行、自动复位、产量设定、加工时间计时器等功能。
7、具有四种不同的拉丝工艺选择,可解决拉丝等工艺难题。
8、支持 DXF 文件导入,自动路径优化功能。
9、动作参数编辑完毕,通过串口将动作参数下载至控制器中,即可脱机立运行。也可将动作参数保存
到手持盒中,方便调用;并能进行设备间的图形拷贝及保存。
10、每条动作指令都有立的开胶延时、关胶延时、退高度、立的提前关胶功能,灵活的批量修改功
能可以提高编辑效率,也可解决堆胶问题。
11、支持按类型分类批量修改参数。
12、实现倒圆角,并且可以撤回,建错了不需要删掉重新建。
13、编辑方面速度响应快,建一行指令只需要不到 0.1 秒的时间。
14、在编辑画面可以点“#”号键可以实现跳转到对应的行号,不需要一行一行的移动。
装机事项
1、检查控制器是否完好无损;
2、按照接线图连接好硬件后,通电前检查电源电压不要** 24V;
3、通电后先设置脉冲单量,再设置原点位置。
3、接着执行复位动作;动作顺序如下:
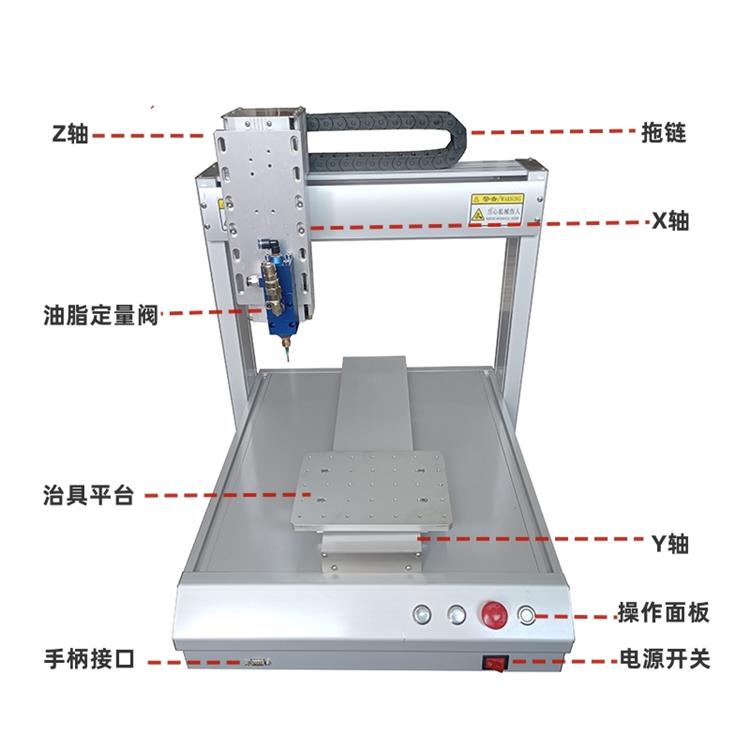
①Z 轴应向原点方向移动,如果移动方向反了(如果是步进系统,对调电机线中的 A,A-或 B,B- 一
组, 如果是伺服系统,需改变伺服驱动器的方向),当感应到 Z 轴原点开关时,Z 轴停止。
②X,Y 轴开始同时移动,移动的方向应向原点方向移动,如果方向反了(同 Z 轴反向时一样处理),当
其中某轴感应到原点开关时,相应的轴将停止移动。
③当所有轴都感应到传感器时,复位动作完成。
到此设备安装工作基本完成。实际测试还需连接气路系统进行全面调试。

1、复制指令操作
“复制指令”用于复制选中的指令,通常用于矩阵复制。Y 键选择要复制的单条指令,F3 为选择要
复制的全部指令,F4 为选择要复制的多条指令。
选择完要复制的指令后,按“操作”进入“复制指令”对话框。
方法一:输入要复制的数量,如果知道要复制的指令坐标之间的距离,可直接输入“X”“Y”“Z”
的坐标间距(即坐标与坐标之间的距离),按“确认”键则复制完成。
方法二:输入要复制的数量,如果不知道要复制的指令坐标之间的距离,则不用输入“X”“Y”“Z”
的坐标间距,然后按“Move”键,通过方向键将设备移动到要复制的后图形的起始点上,按“确认”键,
系统将自动按照相隔距离和复制数量计算其分布间隔。
2、阵列复制操作
方向键 Y 键选择要复制的单条指令,F3 为选择要复制的全部指令,F4 为选择要复制的多条指令。
选择要复制的指令后,按“选择”进入“阵列指令”对话框,如图所示:
方法一:输入要要阵列复制 X 方向数量和 Y 方向数量,然后按“MOVE”键移动到 X 方向后一点
(也就是图中的 A 点),按“确认”;再移动到 Y 方向后一点(也就是图中的 B 点)按确认;即可自
动计算间距。一定要先输入复制数量。 路径方式:运行轨迹选择。
方法二:输入要要阵列复制的 X 方向数量和 Y 方向数量,然后输入要阵列复制的 X 方向间距和 Y 方
向间距,再选择路径方式。后按“确定”键则阵列复制完成。
3、 偏移操作
“偏移操作”用于偏移选中的动作指令,把坐标偏移*的数值。
Y 键选择要偏移的单条指令,F3 为选择要偏移的全部指令,F4 为选择要偏移的多条指令。选择要偏移
的指令后,按“操作”进入“偏移操作”对话框。
方法一:输入要偏移的具体数据,按确定即可完成偏移操作。
方法二:不知道要偏移的具体数据时,也可以通过“移动”键来移动要偏移的数据。按“移动”键,
通过方向键将设备移动到要偏移的坐标上,然后按“确定”键即完成偏移操作。

“MARK 点”对针操作
“MARK”点即为标记点,用于治具上标记点的对针操作。此功能分为:单 MARK 点对针和双 MARK
点对针;
①单 MARK 点对针:
此对针点必须为指令列表的条指令。在指令列表对话框中按“6 更多”加入 MARK 点。
编辑此点的坐标仅用于对针操作,下载程序后不执行此操作。在“开机画面”状态下按“MOVE”键,
针头会自动指向条指令(即标记点上)。
②双 MARK 点对针:
在指令列表中需加入两个 MARK 点,尽量选择治具上距离较远的两个明显标记点作为 MARK 点,这
两个 MARK 点会自动显示在指令列表的条和*二条位置(在编辑指令前或编完指令后加入这两个
MARK 点均可),在指令列表对话框中按“6 更多”加入 MARK 点。
编辑此两点的坐标仅用于对针操作,下载程序后不执行此操作。在“开机画面”状态下按“MOVE”键,
针头会自动指向个 MARK 点,并弹出“Z 轴是否下降”,请根据实际需要选择,此时定位好坐标后按
确定,针头会自动指向*二个 MARK 点,操作同个 MARK 点操作方法相同。
双 MARK 点定位可以修正工件因摆放的角度和位置偏差而引起的误差。

注意事项:
操作设备手持盒时,必须在断电的情况下插拔串口连接线,以免烧坏控制器和手持盒。
深圳市巨川机械有限公司得益于各界朋友的鼎力支持,公司的技术和品质都得到不断进步,技术创造业绩,诚信服务赢得顾客的惠顾。
http://szjcjx.cn.b2b168.com